

对于不规则形状的工件,激光焊接机如何实现精准焊接?
在现代制造业中,越来越多的工件呈现出复杂的几何形态,如曲面、斜面、多角度接缝等。传统的焊接方式难以适应这类不规则形状激光焊接需求。而激光焊接机凭借其高精度、非接触和可编程控制的特点,成为解决此类难题的核心设备。

三维轨迹规划与离线编程
针对不规则工件,首要挑战是焊缝路径的准确跟随。现代激光焊接机通常集成机器人(如六轴机械臂)或三维振镜系统,配合离线编程软件(Offline Programming, OLP),可在虚拟环境中导入工件3D模型,提前规划焊接轨迹。这种方式避免了手动示教的误差,尤其适用于复杂曲面或内部接缝。
视觉引导与焊缝识别
即使工件存在装配偏差,视觉系统也能实现实时纠偏。通过2D/3D视觉传感器扫描焊缝位置,系统自动调整焊接路径,补偿±1–2 mm的位置误差。例如,在焊接汽车排气歧管或医疗器械支架时,该技术显著提升了首件合格率,减少了对夹具精度的过度依赖。
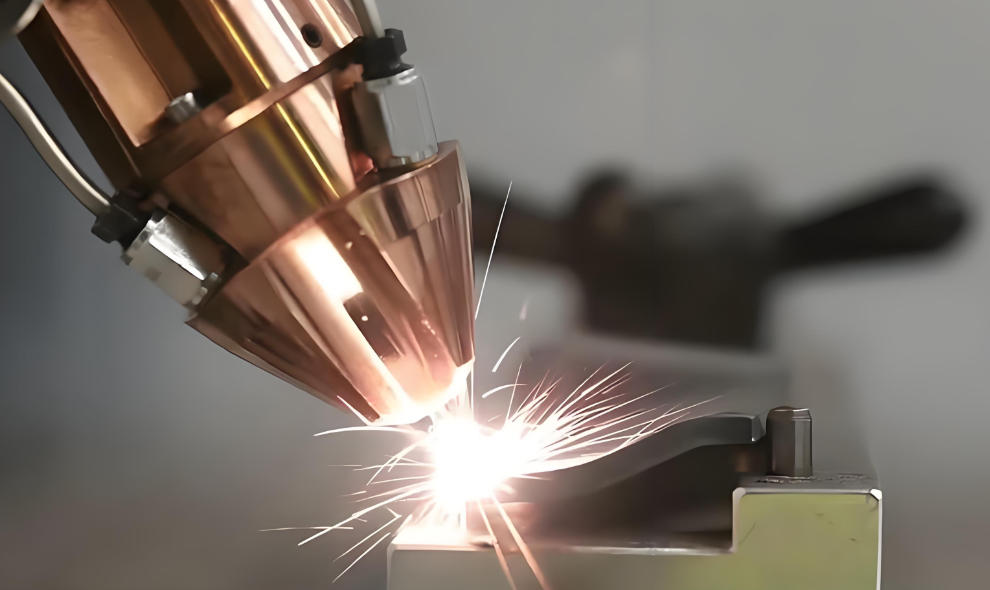
动态聚焦与摆动焊接技术
对于深度不一或间隙变化的焊缝,固定焦点难以保证全程熔深一致。采用动态聚焦模块,可实时调整激光焦点位置,适应不同高度的焊接区域。同时,激光焊接机支持多种摆动模式(如圆形、八字形),通过控制摆动幅度、频率和形状,改善熔池流动性,提高桥接能力和焊缝成形质量,特别适用于存在微小装配间隙的不规则接头。
多轴联动与柔性夹具配合
在处理大型或异形结构件时,常采用“机器人+变位机”组合。双轴或三轴变位机带动工件旋转和倾斜,使焊缝始终处于最佳焊接姿态(如平焊位),从而提升焊接稳定性和熔透性。柔性夹具则能适应多种型号工件的快速换型,减少停机时间。
实现不规则形状激光焊接的关键,在于激光焊接机是否具备轨迹规划、视觉补偿、动态控制和多轴协同能力。对于采购用户,应重点关注设备的编程灵活性、视觉集成度和摆动功能配置。科学选型不仅能应对当前生产需求,也为未来产品升级预留技术空间。

 扫一扫添加微信
扫一扫添加微信